

I sistemi di picking automatici contribuiscono a ridurre i costi derivanti dalla preparazione degli ordini offrendo vantaggi come la riduzione di manodopera, il migliore controllo e gestione delle scorte e lo sfruttamento dello spazio in altezza.
Come è ovvio che sia, negli impianti in cui le attività di picking sono automatizzate, si può ovviare ai mezzi di sollevamento. Va notato però che queste soluzioni rendono al massimo quando si lavora con merci a media rotazione e viene utilizzata per integrare gli ordini dei pallet completi.
Esistono 4 configurazioni relative alla disposizione di questi sistemi all'interno del magazzino:
- Le postazioni di picking si posizionano in testata del magazzino automatico.
- Le postazioni vengono ubicate nelle zone laterali del magazzino automatico.
- Si creano postazioni di picking in zone adiacenti.
- Si ricorre a robot speciali per il picking (come i robot antropomorfi).
1. Postazioni di picking nella testata del magazzino automatico
È la soluzione ideale per magazzini di piccole o medie dimensioni nei quali il picking non rappresenta l’attività principale. Esistono varie alternative che dipendono dalla quantità di ordini da elaborare, ognuna delle quali presenta applicazioni e rendimenti diversi. La configurazione varierà a seconda dei casi.

Postazione di picking installata nella testata di un magazzino automatico.
2. Postazioni di picking nella parte laterale del magazzino automatico
Questa configurazione usa scaffalature per pallet a gravità nel livello più basso (rasoterra) della parte laterale del magazzino automatico. Le strutture sono orientate verso l’esterno, in modo tale che l’uscita dia sul corridoio, come si mostra nella seguente immagine.

Postazione di picking su pallet installata nella zona laterale del magazzino automatico.
Queste postazioni, che possono contenere massimo 3 pallet per canale, accolgono i pallet contenenti i prodotti ad alta rotazione. I pallet completi di riserva occupano altri vani, affinché il trasloelevatore possa riposizionarli man mano che si svuotano.
L’operatore esegue il prelievo lungo l’intero lato del magazzino automatico e con l’ausilio di un transpallet o di un commissionatore. Il picking dei prodotti rimanenti, che si trovano negli altri corridoi e che presentano una rotazione più bassa, avviene nelle postazioni di picking in testata. Questo sistema di picking nella parte laterale è compatibile con i dispositivi pick-to-light che ne agevolano il rendimento.
Picking nelle aree adiacenti
Predisporre un’area di picking a gravità per pallet su entrambi i lati di un corridoio di lavoro è indicato quando si gestiscono prodotti ad alta rotazione. Questa scelta riduce i tempi di preparazione e di movimentazione perché si basa sull'uso di navette che alimentano i tunnel a gravità.
I pallet di riserva sono collocati in un magazzino automatico con trasloelevatore. La comunicazione tra questo magazzino e le navette del picking avviene mediante trasportatori a rulli, Pallet Shuttle, binari elettrificati o con carrelli automatici (AGV e LGV).
Il mezzo di sollevamento consigliato per gli operatori è il transpallet elettrico o il commissionatore a terra.
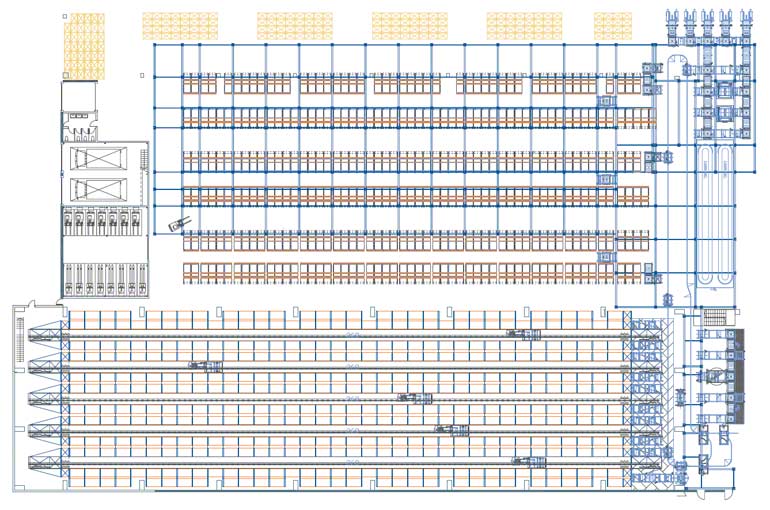
Schema di distribuzione dei pallet per il picking su pallet in un magazzino automatico.

Picking e distribuzione dei pallet su rulli.
Picking automatico tramite robot
Per rendere ancora più efficienti le attività picking è possibile installare robot speciali che agiscono a supporto dei sistemi che operano su percorso fisso.

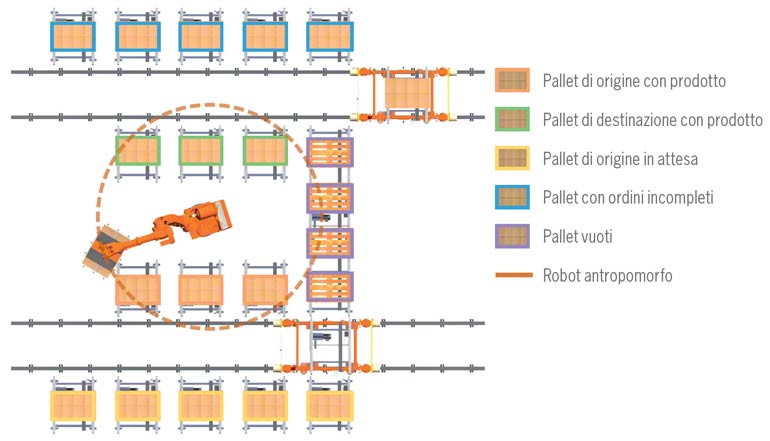
Robot antropomorfo per picking su pallet.
I robot di magazzino possono essere di tre tipi: antropomorfi, a portale a due assi e a portale a tre assi, e sono in grado di movimentare contenitori singoli o strati completi di casse (denominati manti).
Il tipo di robot da installate dipende dai cicli orari che si intende realizzare e dalla combinazione degli ordini:
- I robot antropomorfi possono ruotare a 360° e sono dotati di un braccio articolato che combina vari movimenti che emulano quelli di un braccio umano. Questa macchina è in grado di accedere ai contenitori o agli strati in qualsiasi punto che si trova all'interno del proprio raggio d’azione.
Robot per il picking con portale a due assi.
- I portali a due assi sono invece dotati di un braccio di movimentazione rigido, che prevede soltanto il movimento verticale. Il carrello sul quale è fissato questo braccio si sposta orizzontalmente sul portale, rendendo possibile l’accesso a un punto qualsiasi di uno stesso allineamento. È possibile accedere a diversi pallet collocati in quattro o cinque postazioni, due di origine e i rimanenti di destinazione.
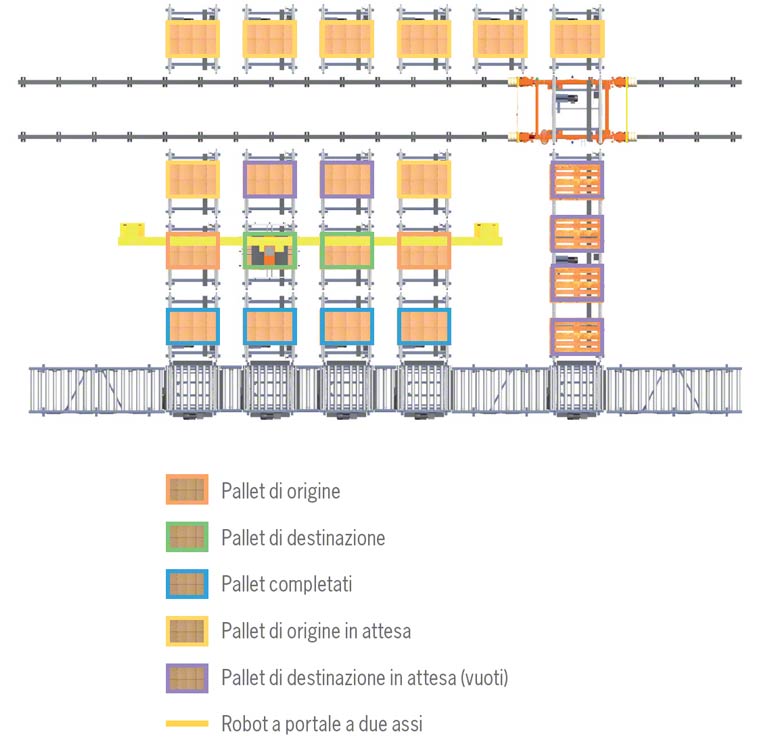
Schema picking preparazione ordini con portale a due assi.

Robot per il picking portale a tre assi.
- I portali a tre assi si spostano lungo un terzo asse che viaggia su una struttura metallica. Alla macchina vengono assegnate postazioni di origine o di destinazione che le ppermettono di accedere a due allineamenti di pallet distinti. Si ottiene pertanto una maggiore diversificazione degli ordini, con la possibilità di prepararne un numero maggiore.
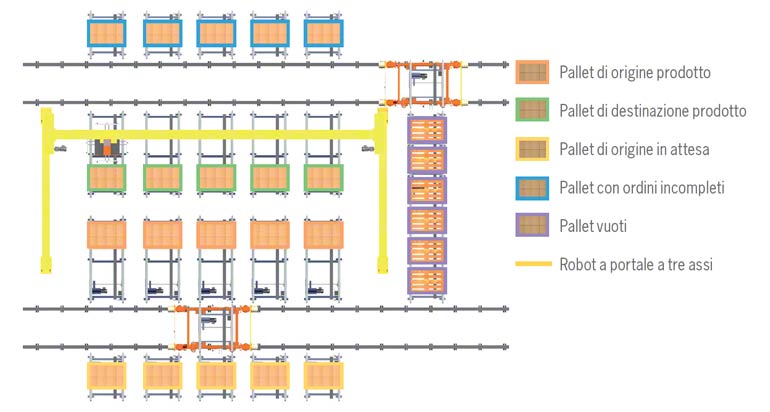
Schema picking preparazione ordini con portale a tre assi.
Per saperne di più sul magazzino robotizzato, è possibile consultare l'articolo del nostro blog interamente dedicato ai robot di magazzino.